














Экспериментальные советские автопоезда с управляемыми колесами полуприцепа
В 1950-х годах в СССР начали создаваться первые конструкции активных автопоездов. Сегодня уже не секрет, что проектировались они с прицелом сугубо на военный призыв, в основном в качестве высокомобильных носителей вооружения. Опытные образцы такого рода техники были построены на базе практически всех серийных полноприводных грузовиков: ГАЗ-63, ЗИЛ-157, МАЗ-501, МАЗ-502. Чуть позднее появились варианты на базе новейших вездеходов ГАЗ-66, ЗИЛ-131, Урал-375, КрАЗ-253, КрАЗ-255Б и МАЗ-537. Участи армейской «активизации» не избежал даже гражданский полуприцеп ММЗ-584 для ЗИЛ-ММЗ-164Н.
Однако практически сразу конструкторы активных автопоездов столкнулись с проблемой большого кинематического рассогласования в приводе колеса тягача и прицепа на поворотах. Кроме того, у военных вызывало нарекание ощутимое снижение проходимости автопоезда на пересечённой местности из-за несовпадения колеи тягача и прицепа при поворотах. Решением обеих этих проблем виделось применение системы управления поворотом колёс полуприцепа. Теоретическими исследованиями в этой области занялись сотрудники военного НИИИ-21 из подмосковных Бронниц, а для практической проверки результатов научных изысканий на при участии 38-го Опытного завода были построены два опытных автопоезда. Первый из них был переоборудован из тягача ГАЗ-63П с полуприцепом ПАЗ-744П. Его сделали в 1959 году.
Вместо штатной неприводной оси на полуприцеп поставили обычный передний мост от грузовика ГАЗ-63 с односкатной ошиновкой. А для поворота его колес предусмотрели две независимые системы управления: автоматическую от системы тяг и копиров на седельно-сцепном устройстве и принудительную от рулевого колеса, установленного прямо в кузове! (Ручная «рулежка» предполагалась, в первую очередь, при сложном маневрировании задним ходом). Там же, в кузове, смонтировали рычаги, с помощью которых можно было выбрать текущую систему управления поворотом или заблокировать колеса в среднем положении.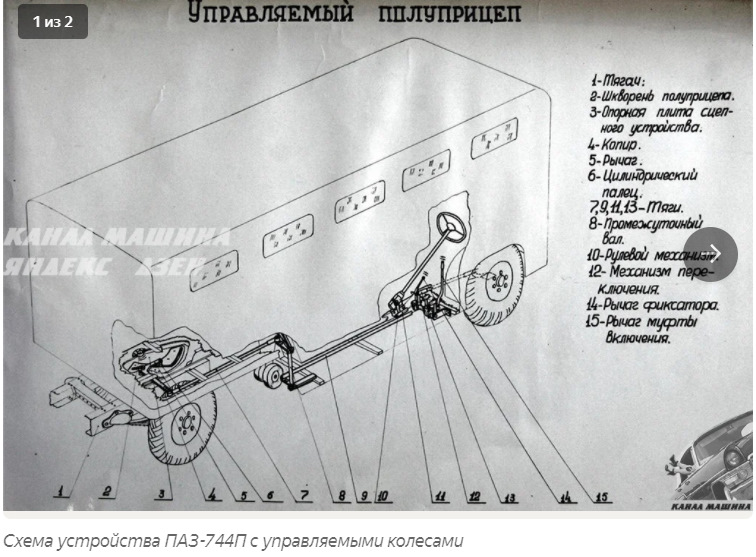

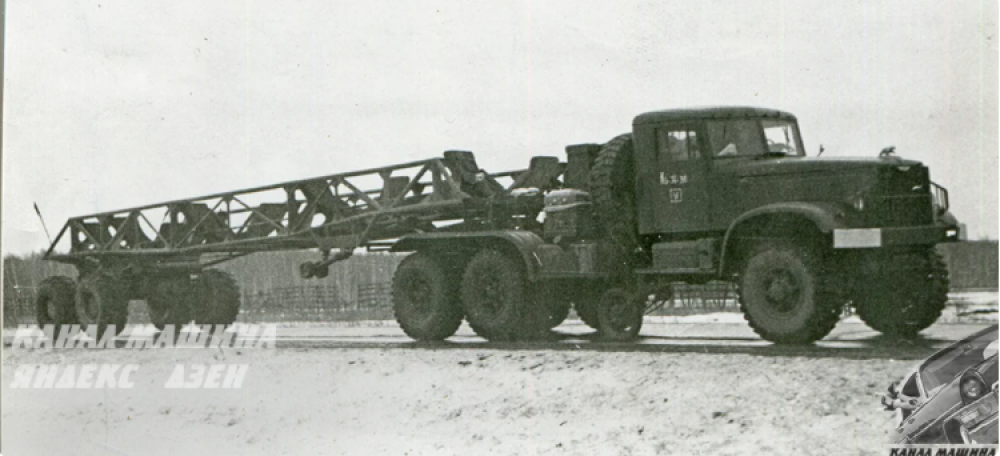
Второй экспериментальный автопоезд – КТ-214-40П – был значительно крупнее. Тягач модели КТ-214 изготовили путем переделки серийного грузовика ЯАЗ-214, которому укоротили задний свес рамы и установили седельно-сцепное устройство от МАЗ-200В вместо бортовой платформы. А вот полуприцеп 40П представлял собой оригинальную конструкцию, спроектированную для экспериментальных тягачей И-21-15 / КМЗ-664. Но поскольку полуприцеп построили раньше, чем тягач И-21-15, то его и начали сперва испытывать в паре с переделанным ЯАЗом.
Несущим элементом полуприцепа 40П являлась пространственная рама, сваренная из алюминиевых труб. Причём конфигурация рамы не оставляла сомнений: единственный груз, под который был рассчитан такой полуприцеп, это ракеты. Ходовая часть модели 40П состояла из двухосной тележки с независимой торсионной подвеской и односкатными управляемыми колесами (шины – широкопрофильные 1200х500-608).
Еще на стадии проектирования в конструкцию полуприцепа была заложена возможность подвода к колёсам крутящего момента путем установки гидрообъемной передачи. Однако в рамках исследования управляемости автопоезда КТ-214-40П необходимости в активизации колес полуприцепа не возникало, а потому узлы гидропривода смонтированы не были.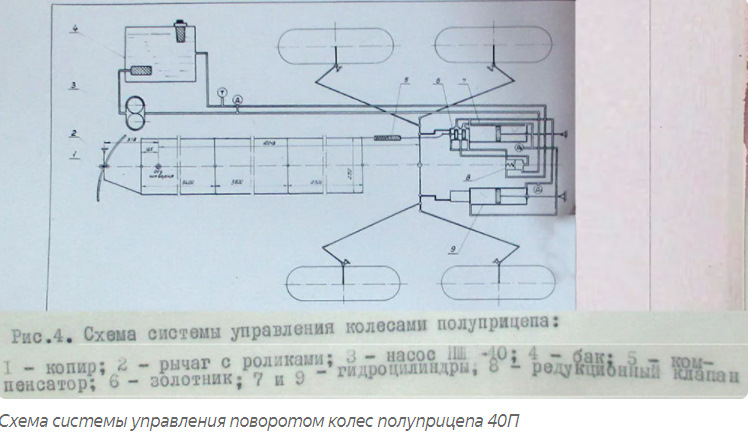
Для колёс полуприцепа 40П была применена система управления гидромеханического типа. Она состояла из механической части, управлявшей работой золотника распределительного устройства, и силовой гидросистемы, непосредственно осуществлявшей поворот колес. Угол поворота колес полуприцепа в данной схеме привода зависел от угла складывания автопоезда. При этом система управления золотником силовых гидроцилиндров включала в себя копир (задающий элемент угла складывания), рычаг с роликами, систему тяг параллелограммного типа и пружинный компенсатор.
Результаты испытаний показали, что управляемые колеса уменьшили смещение полуприцепа к центру поворота почти в 5 раз, а угол складывания и ширину габаритного коридора – в 1,4–2 раза. При этом управляемые колеса и независимая подвеска не нарушили устойчивость прямолинейного движения автопоезда.
К сожалению, в советские годы все эти наработки, по сути, остались невостребованными. И если активные автопоезда впоследствии все-таки выпускались в стране серийно, то вот полуприцепы с автоматической системой управления поворотом колес на конвейер не попали. А жаль! Ведь мы имели все шансы оказаться в числе пионеров в области освоения подобной техники.
источник